Description
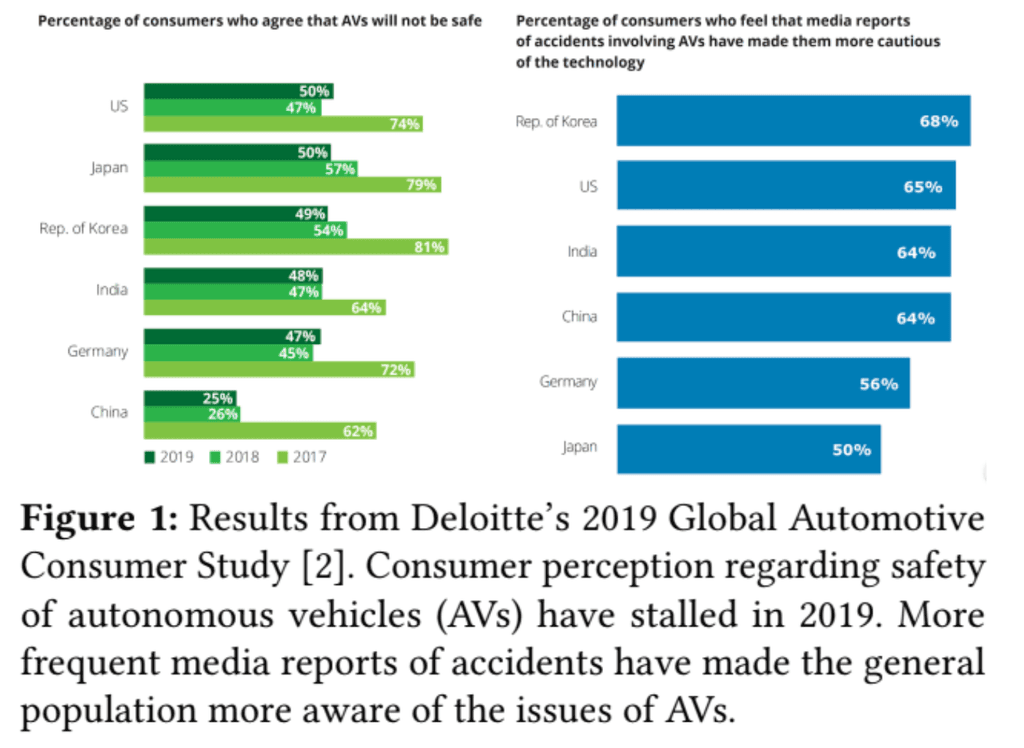
As autonomous vehicles (AVs) near widespread adoption, public trust remains a significant barrier. This research, as part of the UC Berkeley BEST Lab's BRAVO group, seeks to understand what drives consumer trust and apprehension toward AVs, exploring public perceptions of safety in AVs in the United States. Conducted through a broad online survey, the study examines how consumers view AV safety features, potential concerns, and trust-building measures. The findings offer actionable insights for developers leverage human-centered design for more user-friendly experiences.
Date: April 2019
Collaborators: Prof. Alice Agogino, Dr. Euiyoung Kim, Timothy Huang, Hyun Jie Jung, William Peng, Guowei Yang
My Contributions: experiment design, analysis, design prototype

Experiment
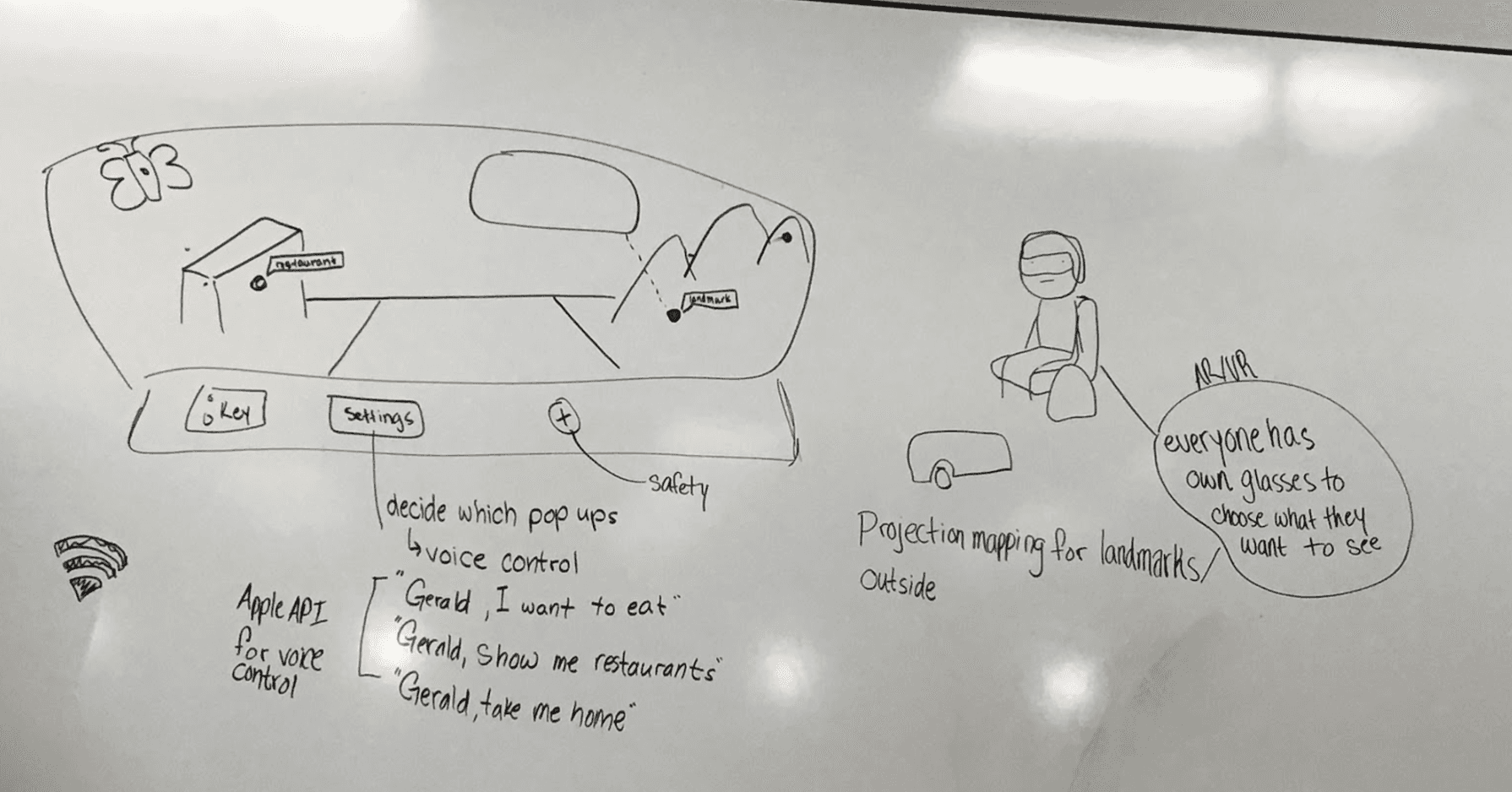
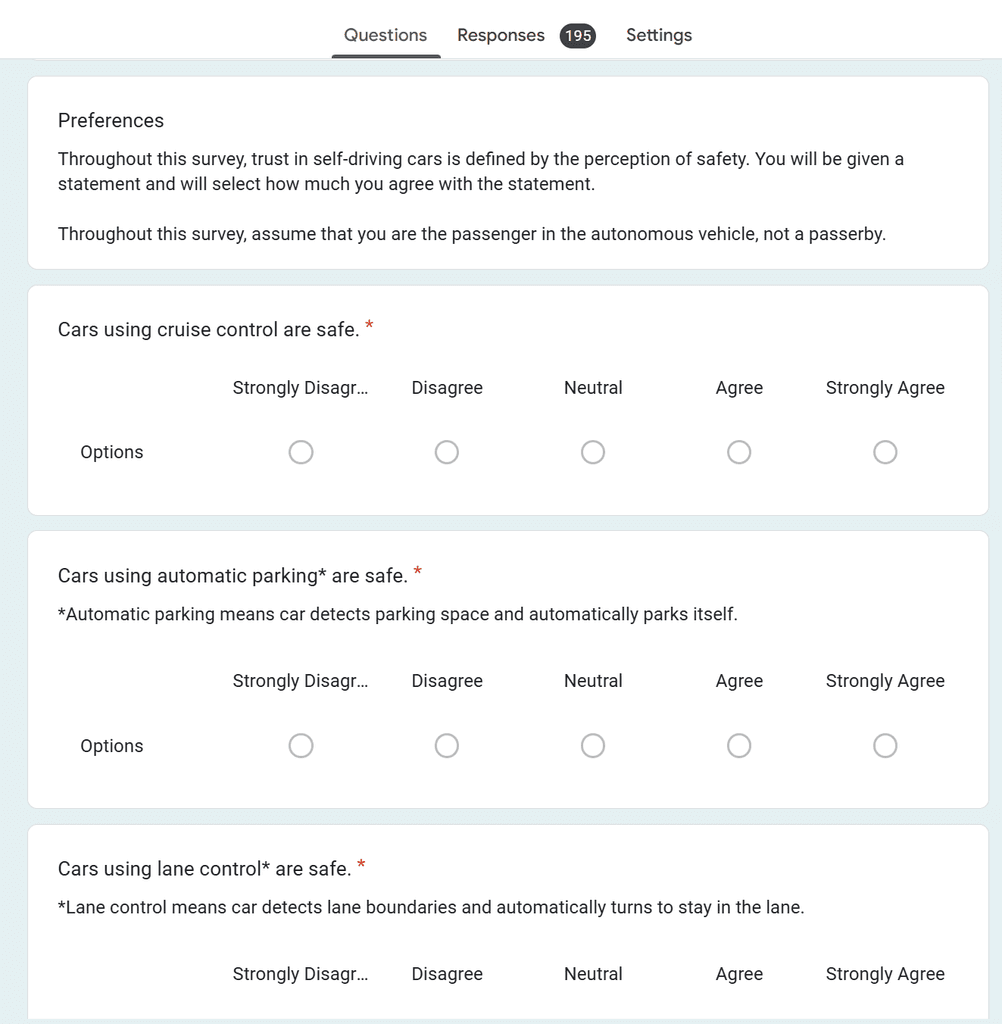
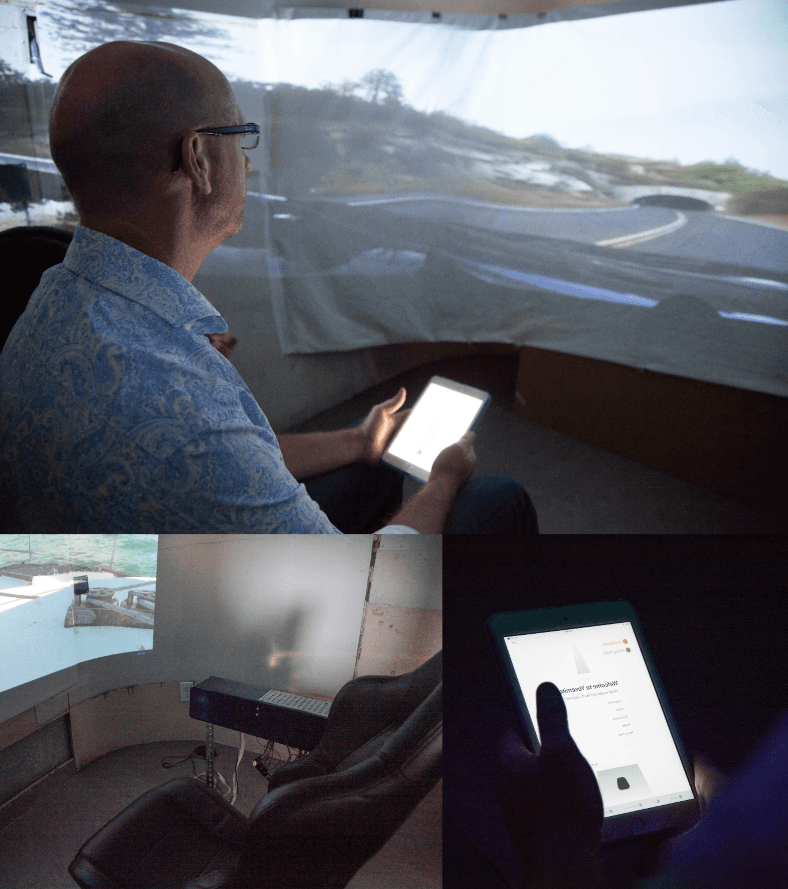
The study employed an online survey conducted through Amazon Mechanical Turk to gather responses from a diverse US population. Survey questions assessed perceptions of AV safety across different automation levels, from cruise control to full automation. Participants ranked key concerns related to improving trust in autonomous systems. The survey also explored how speculative features like augmented reality interfaces and voice-enabled journey assistants would influence perceived safety.
There were 188 responses collected from the survey. The majority of respondents were between the ages 25 through 40 with moderate familiarity with AV technology. Responses from 29 different states in the United States were received. After data collection, the survey response data was analyzed using pandas, a Python data analysis library.
Respondents trust features like cruise control and lane assist but hesitate with full automation in self-driving cars.
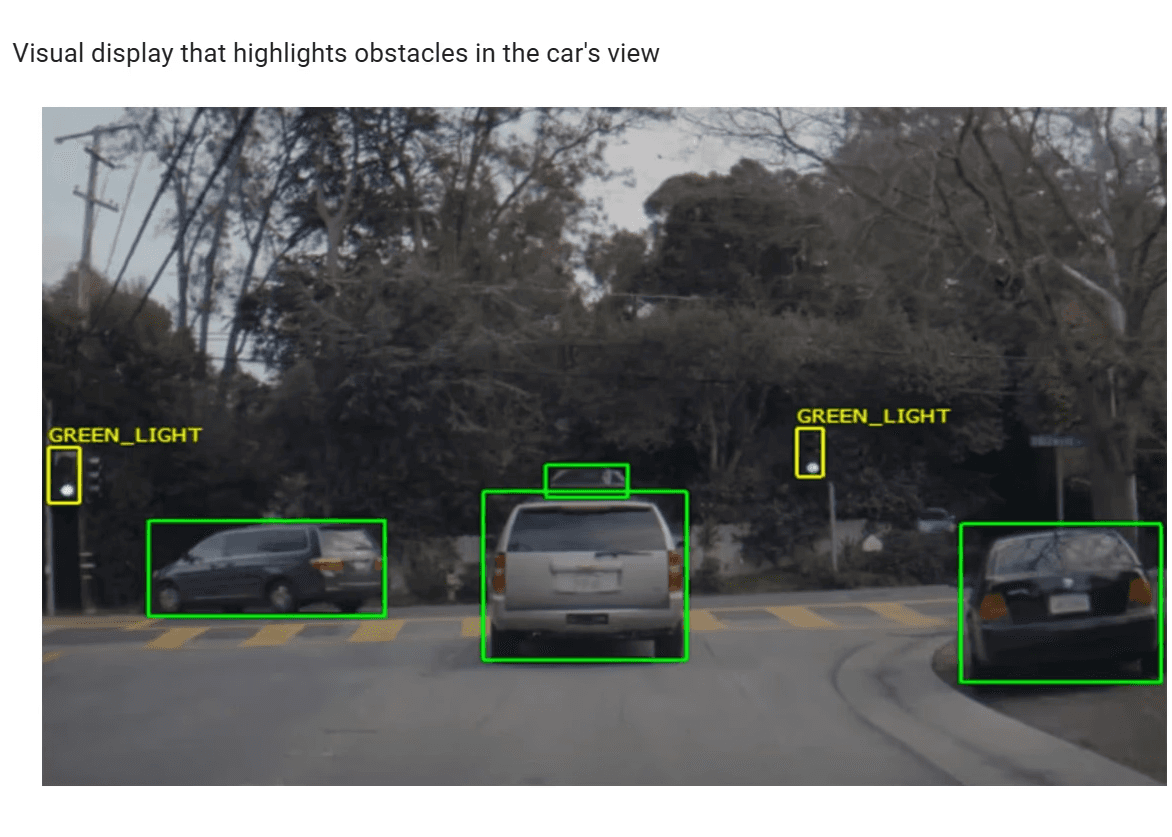
The most pressing concern overall was a lack of visual feedback on what the AV detects. Cybersecurity concerns dominate among respondents with prior AV experience.
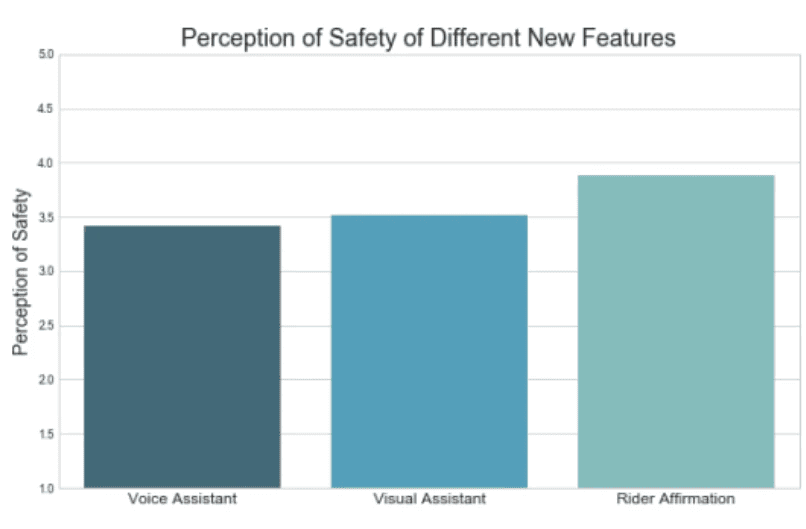
Visual affirmation systems that show what AVs perceive could enhance trust. Respondents preferred visual over auditory feedback due to skepticism towards the effectiveness of current voice assistant technologies.
Those who have experienced AVs firsthand had different concerns to respondents who had limited exposure, highlighting the importance of physical exposure and familiarity in fostering trust.
Improving public trust in AVs requires not only robust technical reliability but also transparent design features that reassure users about AV capabilities. Developers should prioritize real-time feedback systems and public education efforts to encourage widespread adoption.
Future work could explore specific rider affirmation systems to determine how riders respond to certain features in autonomous vehicles. With the rise of AVs, more focus should be shifted towards improving the rider experience.
Note: My team's initial application to the Lemelson-MIT Student Prize 2019 for this research in the BRAVO group advanced to the "Move it!" category round.